

Underwater sound detector in WW1 and WW2
by Robert Derencin
1. Introduction
Underwater sound detector is a hydro acoustic device intended to separate target's sound waves from sound waves of environment. In this case, the target is a surface ship or a submarine, and the environment is an ocean. The ultimate intention is to detect being of any object (a ship or a submarine) in the vicinity of the underwater sound detector and, if that is possible, direction and range of the object.
2. Ship's (submarine's) acoustic field
Ship's acoustic field is a space in which the ship's noises can be detected. A total ship's acoustic field is a sum of all acoustic components. The components depend about ship's type and individual characteristics (number and shape of her propeller, shape of her underwater part, grade of her axis and mechanism balance…), about ship's displacement and speed. A submarine acoustic field depends also about depth of the submarine.
Main noises inside ship's acoustic field are:
- ship's engines noises (main and auxiliary engines, axis vibration, outflow of fluids…)
- ship's hull noises (skin friction between water particles and ship's hull plating)
- propeller noises (propeller-excited vibrations plus cavitation)
There aren't two ships (or two submarines) with same noise. There are some characteristics ship's noises:
- low speed propeller- more low frequency than high frequency noises,
- high speed propeller- more high frequency than low frequency noises,
- more numbers of propellers- more high frequency than low frequency noises,
- minesweepers- noises mostly between 300 to 400 Hz.
There are differences from ship to ship about noise's frequency and sound pressure. Depending about ship's speed, the same ship can produce different noises. Table 1 shows various kinds of frequency of noises and sound pressure depending about ship's type and speed.
Table 1:
| Ship type | Ships's speed | Frequency of noises | Sound pressure |
| Minesweeper | 28 knots | 200 - 400 Hz | 1200 bar |
| Minesweeper | 4.6 knots | 100 - 200 Hz | 3 - 4 bar |
| Minesweeper | 26 knots | 100 - 200 Hz | 240 - 250 bar |
| Torpedo boat | 26 knots | 200 - 400 Hz | Less than 10 bar |
3. Underwater sound detector in WW1
In World War One about 3000 Allied counter submarine ships were equipped with underwater sound detectors. It is considered that the first submarine detected by underwater sound detector (and destroyed by surface ship) was German submarine U-3 in English canal. In October 1914 German submarine U-27 destroyed British submarine E-3. It was the first time that one submarine destroyed another submarine. From 1917, almost all British submarines were engaged in fight against German submarines. Because of that, the British submarines were equipped with underwater sound detectors.The first underwater sound detectors functioned by principle of "sound shadow". Two hydro-phones were mounted on underwater part of a ship's bow, each hydro-phone on each side of the bow.
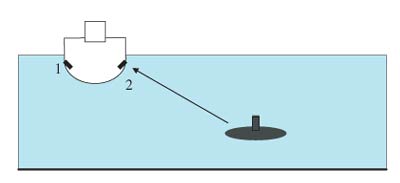
Captured underwater noise was transmitted directly from the hydro-phone to operator's ear-phones. The each ear-phone was connected with the one hydro-phone. By strength of noise in particular ear-phone, the operator detected from which side (starboard or port side) the noise coming. The ship turned round until the noise was now same in booth operator's ear-phones. When the noise was same in the both ear-phones the ship's crew knew that the ship is on course to the source of the noise, i.e. to the submarine. Range of that first underwater sound detectors was up to 4 nautical miles, accuracy was from 15 to 20 degrees.
To avoid her own noises, when the underwater sound detector was in function the ship had to be stopped. Picture number 1 shows principle of the underwater sound detection mentioned above. Submarine's signal are louder in hydro-phone number 2 than in hydro-phone number 1. Because of that, in ear-phone which is directly connected with the hydro-phone number 2, will be louder signal, too. The sound detector operator will know on which side of the ship the submarine is positioned.
Picture 1:
The first hydro-phones functioned on principle of magnetostriction or piezoelectricity. Mechanical vibrations of membrane, evolved from underwater noises, were converted into electric voltage, which was brought to the ear-phones. Underwater sound detectors based on binaural method (binaural- "for both ears") were installed in 1917. Their hydro-phones were mounted on a both ends of special handle, which was mounted on underwater part of a ship's bow. Distance between the hydro-phones had to be at least 0.95 metres. The underwater sound detector operator turned round the handle, around the handle's centre, until a detected noise was not same in both ear-phones. Range of detecting was enlarged. Accuracy was from 3 to 4 degrees. Underwater sound detectors based on binaural method were also used in WW2.
Picture 2:
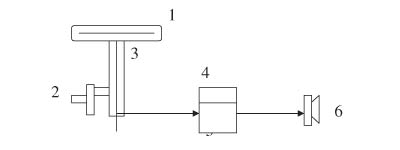
Picture number 2 shows scheme of underwater sound detector used in United States navy during WW2.
1- binaural hydro-phone
2- handle for the hydro-phone's revolution
3- axis
4- noise amplifier
5- super heterodyne amplifier
6- loud speaker or ear phones
4. Underwater sound detector in WW2
There were some improvements of the underwater sound detectors between WW1 and WW2. Hydro-phones based on electrodynamic and piezoelectricity have been introduced. Electric compensator enabled detection of direction without revolving of the hydro-phones. Numbers of the hydro-phones of particular underwater sound detector were increased. Also, underwater sound detection by principle of interference has been applied. By the principle of interference a ship's or a submarine's own noises had less influence. Because of that, accuracy of detecting was from 2 to 3 degrees, range of detecting was more than 10 nautical miles.
In WW2 the underwater sound detectors were installed on the submarines of all involved navies. The underwater sound detector consisted of:
acoustic system: group of piezoelectric hydro-phones (up to 24 hydro-phones) who changed sound vibrations into electric energy,compensator: engaged detecting of sound's (i.e. target's) direction without revolving the hydro-phones,
amplifier: amplified received signals (noises),
indicator: cathode tube, loudspeaker or ear-phones.
Some underwater sound detectors had also a filter for choice of wave (i.e. noise's) band, mostly to avoid own noises.
Possibilities of underwater sound detecting in WW2:
Experienced underwater sound detector operator was able to determine is a detected ship a cargo ship or a warship (type of the warship), approximate speed or manoeuvre of the ship (approaching, digression, increasing or decreasing of speed and depth, if detected object was a submarine).
When detected (submerged) submarine stopped her moving, the operator was able to determine which mechanisms of the submarine still operated. To avoid own noises, a submarine could use underwater sound detector if her speed was up to 6 knots. If a submarine speed was 4 knots, the submarine's underwater sound detector average distance of detecting another object was:
- for a destroyer- 5 to 10 nautical miles,
- for a cargo ship- 3.5 to 7.5 nautical miles,
- for a convoy- up to 50 nautical miles.
If a submarine speed was 15 knots, the submarine's underwater sound detector possibility of detecting another object was rapidly decreased [although no submarines except XXI and XXIII were able to reach that speed during WWII]. In that case, average distance of detecting another object was up to few hundred metres.
5. Definitions of some technical expressions mentioned in the article
Cavitation. The rapid formation and collapse of vapor pockets in a flowing liquid in regions of very low pressure, often a frequent cause of structural damage to propellers, pumps, etc.Electrodynamic. Pertaining to the force of electricity in motion.
Hydrophone. A device for locating sources of sound under water, as for detecting submarines by the noise of their engines.
Magnetostriction. A change in dimensions exhibited by ferromagnetic materials when subjected to a magnetic field.
Piezoelectricity. Electricity, or electric polarity, produced by mechanical pressure on a non conducting crystal.
Heterodyne. Noting or pertaining to a method of changing the frequency of an incoming radio signal by adding it to a signal generated within the receiver to produce fluctuations or beats of a frequency equal to the difference between the two signals.
6. Conclusion
In WW2 active sonar (Asdic) was fitted on a surface ships. It was so because the surface ships didn't care if submarines knew for their presence or not. Even better, presence of surface ship (a destroyer or a patrol craft, for example) caused giving up of submarine attack. Also, with the active sonar (Asdic) it was possible to determine range between the surface ship and submarine.
Passive sonar (Underwater sound detector) in WW2 was fitted on submarines. The submarines were able to detect presence of surface ships (and another submarines) in their vicinity, and the submarines stayed undetected. But, those days, passive sonar wasn't able to determine range of another ships or submarines.
Today, the sonar fitted on surface ships or submarine can work in both mode, passive mode and active mode. But today even passive mode working sonar can determine range of another object (a surface ship or a submarine). What is more important, if the submarine sonar is working in the passive mode, the submarine will stay undetected.
And, don't forget that the first task of any submarine is to stay undetected.
This article was published on 25 Jan 2003.
|
Books dealing with this subject include
|